
Introduction
L'idée de ce projet nous est venue en jouant au tennis... En effet, sur terre battue, plus le jeu avançait, et plus les lignes devenaient incertaines, disparaissant sous une couche de poussière.
Les nettoyer était relativement peu intéressant, plutôt fastidieux, et assez chronophage (10-15min pour nettoyer un terrain).
Nous avons donc eux l'idée d'automatiser ce processus, via un robot nettoyeur, que nous avons appelé "Sweeper Robot".
SYSML
Pour nous aider à visualiser les actions que notre robot devra réaliser, et définir un cahier des charges, nous avons réaliser deux diagrammes SYSML :
- Un diagramme des cas d'utilisation, pour représenter les actions et interactions du robot.
- Un diagramme des exigences, qui fera office de cahier des charges.




Présentation l'équipe

Mathis, le chef d'équipe
Mathis, le plus âgé de l'équipe, est le seul adulte de la team. Nous lui avons donc donné le rôle de chef d'équipe, car nous le savons capable de nous canaliser, et de gérer les quelques tensions et incidents qui allait se produire au cours de cette aventure.
Il est dans la filière ITEC, et veut s'orienter vers un DUT dans le domaine de la mécanique.

Samuel, responsable financier
Samuel, a été désigné responsable financier à l'unanimité, sans doute en raison de sa nationalité suisse... Il a l'habitude de gérer et d'organiser son argent de poche, et sera sans aucun doute capable de gérer les comptes du projet.
Lui aussi en ITEC, il pense s'orienter vers un BTS dans le domaine de la maintenance.

Côme, le responsable organisation
Côme, chef de patrouille chez les Scouts, s'occupera de l'organisation et de la planification. Au vu de son poste de chef de patrouille, il a l'habitude de s'occuper de l'organisation, et de planifier diverses activités.
Il est le 3ème ITEC du groupe, et veut s'orienter vers une licence STAPS, afin de faire professeur de sport, lui qui est très déjà sportif en dehors des cours.

Gabriel, responsable communication
Et le meilleur pour la fin, Gabriel, le responsable communication (et oui c'est moi qui ait rédigé tout ce que vous venez de lire...). J'ai souvent rédigé des articles sur des forums pendant mon temps libre, et je pense être capable de gérer ce blog pour toute la durée du projet.
Je suis le seul SIN du groupe, et je compte faire un BTS SIO (informatique) l'année prochaine.
Recherche de l'existant
Afin de concrétiser ce projet, nous avons rechercher des systèmes existants similaire à notre idée, ou pouvant s'en rapprocher assez pour pouvoir l'intégrer à notre système.

Le robot tondeuse.
Nous avons première trouvé que les robots tondeuse avait une façon de se déplacer et d'orienter assez similaire à ce que nous avions imaginés.
Nous avons donc dans un premier temps décidé de s'inspirer de ce système pour les déplacements du robot.

La brosse
Nous avons ensuite cherché un moyen de nettoyage pour les lignes.
Nous avons donc recherché ce qui était utilisé pour les nettoyer à la main, et avons décider de s'en inspirer.
Capteur
Afin d'orienter le robot et de pouvoir suivre les lignes, nous avons décidé d'utiliser un capteur de couleur.
Ce type de capteur renvoie le pourcentage de couleurs primaire (Rouge Vert Bleu) de la surface sur laquelle il est pointé. Il permet ainsi de déterminer la couleur de la surface.
Nous avons identifié 3 capteurs qui aurait pu convenir, nous avons donc réalisé une matrice de décision :

Nous avons choisi comme critère principal la facilité d'utilisation, car ayant uniquement un SIN dans le groupe, il était important de ne pas perdre de temps avec un capteur difficile à comprendre et utiliser.

Grace à la matrice de décision, il c'est avéré qu'un circuit TCS3200 était le meilleur choix.
Ce type de circuit est décliné en une multitude de capteurs, nous avons choisi celui avec la meilleur appréciation des utilisateurs, et dans une tranche de prix raisonnable.
Déplacement
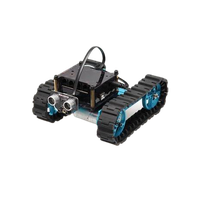
Pour gérer le déplacement du robot nous avons choisis un kit chenilles, afin d'assurer la stabilité du robot, même sur des terrains accidentés (ornières dans la terre battue dû à la pratique du tennis).
Ces chenilles sont propulsés par deux moteurs à courant continu (6.0V)
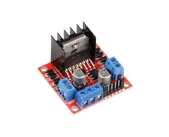
Pour gérer indépendamment le sens de rotation de ces moteurs, ils nous aurait fallu deux pont en H.
Afin de nous simplifier la tache, nous avons choisi d'utiliser un Shield (un L298), permettant de contrôler le sens de rotation de deux moteur simultanément, et indépendamment.