Ball'Bot
- Le Para-Tennis
Les handicapés sont de plus en plus nombreux à vouloir jouer au tennis. Actuellement, ils représentent 4% des licenciés soit 40 000 personnes en France. Mais il y a un problème majeur, ils ne peuvent pas être autonomes, ils demandent une assistance d'une autre personne pour ramasser les balles.

Clientèle visée
Les personnes pratiquant le Para-Tennis et les entraîneurs pour optimiser les entraînements
Projet
Le projet est de créer un robot autonome et automatique pouvant ramasser et stocker les balles en peu de temps sans que cela demande un effort à l'utilisateur.
Motivation du groupe
L'équipe Ball'Bot regroupe trois élèves de terminale motivés et déterminés dans la création de leur projet ayant pour but de minimiser les blessures lors du ramassage des balles et de faire progresser
le para-tennis
Le déroulement du projet.

Phase 1: Nous avons analysé les différents aspect du projet, son but, dans quel cadre l'utiliser et s'il existait des systèmes du même type. Pour finir, nous avons constitué un livrable muni des éléments ci-dessus afin de faire valider le projet.
Les premières idées
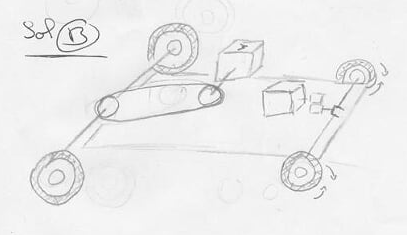
Phase 2:Dans cette partie, les choses sérieuses commencent. Une grosse partie du travail a été l'étape d'idéation. Le principal but de cette partie a été d'imaginer toute les solutions possibles pour le ramassage des balles, le déplacement, le stockage. Ci-dessous, vous pouvez voir les différents schémas effectués ainsi que les solutions retenues. Pour visualiser le projet nous avons construit cette maquette pour nous projeter dans le futur.






Réutilisation d'un système existant

Le projet devient de plus en plus concret! Aujourd'hui, nous avons construit un prototype nous permettant de rendre concret chaque mouvement de notre robot afin d'affiner les différentes solutions évoquées. Avec toutes ces solutions apparaissent de nouveaux problèmes que nous allons résoudre grâce au tests.

modélisation 3D
Phase 3: Nous avons terminé la modélisation 3D, maintenant nous sommes passés à la phase de construction. Donc, nous avons commencé à imprimer les pièces que nous avons créées telles que le système de ramassage ou encore les engrenages pour la motorisation du convoyeur.

Prototype/Olympiades
Le prototype est bientôt terminé. Nous allons aux olympiades de l'ingénieur à Grenoble. On va rencontrer d'autres lycéens et des entrepreneurs qui vont nous donner leurs avis sur notre projet




Développement durable
En 2018, les entreprises cherchent à se développer écologiquement, c'est pour cela que l'on a cherché à présenter un produit le plus écologique possible.
Mais comment être écologique ?
Notre système se déplace, on se doit donc d'utiliser des moteurs, mais pour ce qui est du convoyage de la balle nous avons cherché à utiliser des énergies déjà présentes sur le système. On utilise donc les moteurs pour déplacer le système, et pour ramasser des balles.
Nous avons donc mis en oeuvre un système d'engrenages imprimés en 3D (pour le prototype) pour utiliser le mouvement des roues afin de mettre en mouvement le convoyeur.
Voici une photo du système du prototype :

Phase 4: finalisation du prototype
Le projet touche bientôt à sa fin non avons réussi à finaliser notre prototype comme vous pouvez le voir ci-dessous. Nous avons effectué de nombreux tests, cela nous à permis de valider les différents systèmes ainsi que leur fonctionnement (lame de ramassage, convoyeur, système de transmission ainsi que dimensionnement du châssis). Il nous reste donc maintenant à déterminer des solutions durables pour que notre projet puisse être commercialisé.

Idées pour la suite
Dans le futur, le but est de rendre notre robot le plus écologique possible en le rechargent avec l'énergie solaire.



